 13851281922
13851281922 13851281922
13851281922



发电机组真空除氧器汽液两相流疏水器整定与设计

分析当前1000MW超超临界发电机组真空除氧器汽液两相流疏水器水位调节系统不完善的两个主要原因,一是调节器参数整定没有做到科学化,二是可以避免的状态切换扰动没有针对性的逻辑设计。提出优化方法,一是给出真空除氧器水位自动调节器参数整定计算方法,二是无扰切换判断逻辑设计。
真空除氧器水位的稳定对锅炉给水泵、汽轮机轴封冷却器、凝结水泵和汽轮机背压以及凝结水杂用水用户都有重要影响。目前普遍采用调节阀调节真空除氧器水位的方法,还有少数采用变频凝结水泵控制真空除氧器水位。鉴于电力行业内近期发生的变频设备(凝结水泵)运行中机械设备损坏事件,以及基于1000MW机组凝结水调负荷节能型协调控制系统的开发及研究项目。对真空除氧器水位控制提出了更高的要求,本文给出真空除氧器水位自动调节器参数整定计算方法和无扰切换判断逻辑设计。
真空除氧器工艺流程
真空除氧器是发电机组热力循环当中的储水设备,与其连接的设备主要有来自低压加热器的供给凝结水的管道和供给锅炉用水的给水管道,还有抽汽管道、辅助蒸汽管道、排汽到疏水扩容器管道、排水到凝汽器管道、来自高加正常疏水管道、高加连续排汽管道、排水到机组排水槽管道。
某厂为1000MW超超临界燃煤发电机组。真空除氧器型号为GC-3250/GS-350。除氧水箱设计压力为1.46MPa,设计温度为390℃。除氧水箱为卧式圆筒形容器,内径4200mm,筒长33400mm。
真空除氧器的出水管道连接2台电动给水前置泵、2台汽泵,供给锅炉的用水。
发电机组的热工控制系统采用国产的和利时MACSV6控制系统。
2真空除氧器汽液两相流疏水器水位调节系统的结构和整定计算
单冲量调节系统的整定
发电机组锅炉点火时凝结水流量约为400t/h。随着炉膛温度逐渐升高,锅炉需要的给水增多,凝结水量随之上升到800t/h以上,当给水流量约达到1481t/h时发电机组并网运行。所以单冲量调节系统工作在发电机组启动的前半程。在调节对象传递函数相同的情况下,串级三冲量自动调节系统的主调节器参数整定结果也适用于单冲量调节系统的调节器3。
3真空除氧器汽液两相流疏水器水位调节系统的信号分析
3.1调节系统稳态分析
图1中,给水流量的系数0.76不精准,造成调节系统稳态时的三冲量主调节器输出不为零。若把副调节器给定值=主调节器输出+给水流量×0.76×0.03,改为副调节器给定值=(主调节器输出+给水流量×0.76)×0.03,那么系数0.03造成主调节器输出非零值进一步扩大,如表3所示。主调节器输出非零值意味着主调节器进口有调节偏差,造成不必要的调节过渡过程之后才达到稳态。此处的系数0.03造成主调节器作用非常弱,调节系统稳态误差很大。
表3主调节器输出信号表
发电机组负荷/MW 三冲量主调节器输出值
354 22.0
400 23.4
500 37.7
600 46.4
700 49.1
800 56.0
900 59.3
1000 64.8
3.2关于无扰切换的分析
存在扰动的两个来源:变比例调节与分段调节。为了实现调节系统状态切换无扰,调节器应有跟踪功能,设置跟踪开关、跟踪信号选择逻辑,见图4和图5。当调节系统状态切换扰动无法避免时,在主调节阀手操器入口、副调节阀手操器入口设置限速器加以抑制,见图6。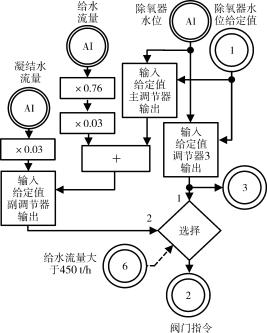
图4跟踪开关逻辑图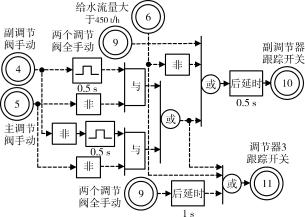
图5选择跟踪值逻辑图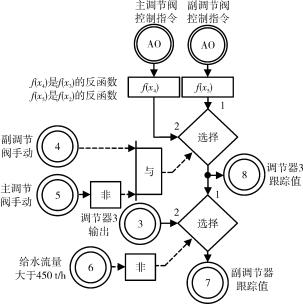
图7跟踪开关及跟踪值时序图
图6变比例调节和分段调节逻辑图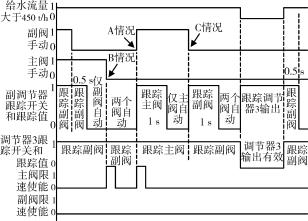
注意跟踪值不应位于其信号死区。跟踪值从高到低优先依次为自动状态的阀门指令,有值班员干预的、被监视的阀门指令。
各个功能切换状态如下。
1)两个调节阀全手动时调节器跟踪,跟踪值为副调节阀阀位。
2)仅主调节阀切到手动的瞬间,对副调节阀无影响,无变比例调节扰动。
3)仅副调节阀切到手动的瞬间,对主调节阀有影响,有变比例调节扰动。应跟踪主调节阀阀位。见图7跟踪开关及跟踪值时序图中的“A情况”。
4)仅副调节阀切到自动的瞬间,应跟踪副调节阀阀位。
5)仅主调节阀切到自动的瞬间,应跟踪主调节阀阀位。
6)主调节阀居于二个切到自动的瞬间,应跟踪副调节阀阀位。见图7中的“B情况”。
7)副调节阀居于二个切到自动的瞬间,对主调节阀有变比例调节扰动,应跟踪副调节阀阀位。此时主调节阀指令由变比例函数切换到分段函数,造成立即关小主阀,同时副调节阀迅速开大。此时预备操作方法为开大副调节阀,同时关小主调节阀,靠近和满足分段函数的主、副阀位分配关系,先投入副调节阀自动,后投入主调节阀自动。这种状况无法避免扰动,应将正确的预备操作方法写入操作规程。见图7中的“C情况”。
3.3调节阀指令限速器使能的分析
由图6可知,发生图7中A情况时,真空除氧器水位主调节阀指令由分段函数∫(x1)的输出切换到变比例函数∫(x3)的输出,可能置位主调节阀手操器前的限速器使能。若跟踪主调节阀指令,则无扰。
发生图7中B情况时,真空除氧器水位主调节阀指令由当前值班员预设的位置,阶跃变化到分段函数∫(x1)的输出,可能置位主调节阀手操器前的限速器使能。
发生图7中C情况时,真空除氧器水位主调节阀指令由变比例函数∫(x3)的输出切换到分段函数∫(x1) 的输出,必然置位主调节阀手操器前的限速器使能。
从图7中看出,副调节阀手操器前限速作用总不使能,说明跟踪开关和跟踪值选择逻辑的效果使得副调节阀无扰动跳变。
3.4对真空除氧器汽液两相流疏水器水位调节系统逻辑设计建议
1)以折线函数∫(x)取代恒值0.76,用以确定凝结水流量与给水流量的配比,以生产实际的量值修正函数关系。
2)依照副调节器给定值=主调节器输出+给水流量×0.03×∫(x),注意运算次序。
3)副调节器跟踪开关、调节器3跟踪开关增加条件:主阀自动并且副阀切入手动0.5s脉冲,或主阀自动并且副阀切入自动0.5s脉冲。
4)主、副调节阀手操器进口限速器限速条件:主调节阀手动时不限速,限速器进出口差值大于2时限速。
真空除氧器水位自动调节应充分利用真空除氧器的容积裕量,兼顾凝结水压力稳定的要求,采用较大的衰减率。这样有利于凝结水杂用水用户、轴封冷却器和凝结水泵的稳定运行。充分利用逻辑编程功能,构成复杂调节系统,防止状态切换的扰动。实践当中的热工自动调节系统经常优化参数和变更逻辑设计方案,此时应配合数学工具进行,防止疏漏和没有化简的逻辑,应该调试和验收。